[作者-柑橘全程机械化平台|编辑-王欣芮|审核-刘心月]近日柑橘全程机械化平台课题组以“自主导航柑橘表型巡检机器人设计与试验”为题农业机械学报发表研究论文,本组鲍泽韩同学参与其中。该研究提出了一种适用于柑橘育苗的全自动表型巡检机器人,提高了柑橘育苗的自动化水平。
 巡检机器人系统
巡检机器人系统
巡检机器人系统主要由负责采集数据与执行动作的硬件以及负责处理数据的软件两部分组成。整个系统的硬件部分由四轮电动底盘、工控机、雷达、IMU、深度相机、路由器以及便携式WiFi组成。巡检机器人的全貌如下图所示。
巡检机器人系统软件部分由巡检控制APP、自动驾驶相关算法、图像采集与处理程序和云端数据库组成。巡检机器人系统各部分硬件与软件间的配合关系如下图所示。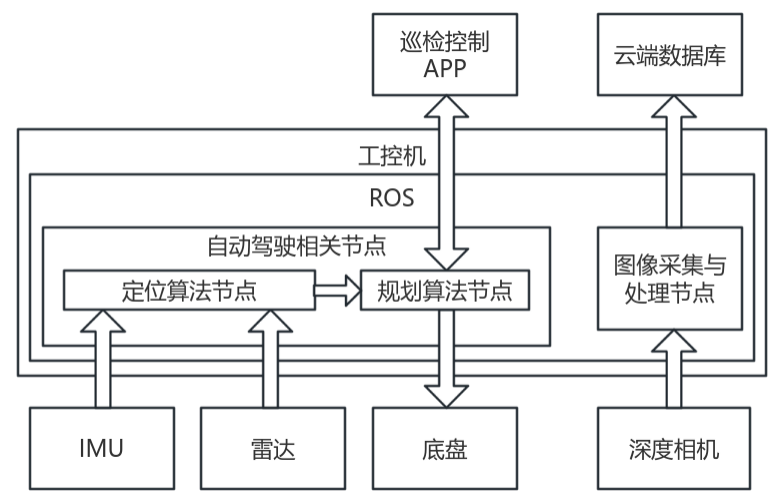
巡检机器人自动驾驶的实现如下图所示,其中建图算法包括三维激光雷光SLAM算法和将三维点云地图转二维栅格地图的投影算法。自动驾驶时,由定位算法通过已有的三维点云地图获取巡检机器人所在位置,之后由路径规划算法规划出到达目标点的全局路径与局部路径,最后控制巡检机器人按照规划出的路径行走,不断重复这个过程,直至巡检机器人到达目标点。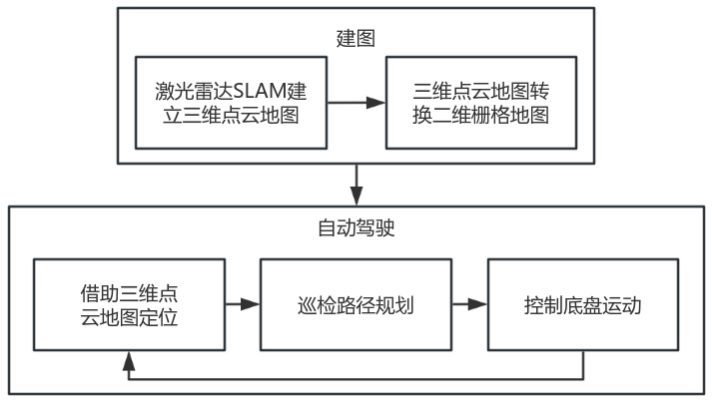
巡检机器人采用LIO-SAM三维激光雷达SLAM算法进行三维地图构建,之后使用CloudCompare软件对获取的三维地图进行预处理,最后通过投影算法得到二位栅格地图。
巡检机器人采用HDL_localization算法进行巡检过程中的定位。该算法基于无迹卡尔曼滤波框架,融合先验的IMU数据和点云匹配得到的测量结果,得到更加精准的定位值。
因为巡检的路线相对固定,同时要避免在巡检过程中因机器人位姿不当导致采集的图像数据质量差,巡检机器人将Dijkstra全局路径规划算法与TEB局部路径规划算法相结合,实现全局路径的定义及局部路线的实时优化调整。
巡检机器人系统使用YOLO v8s模型对柑橘苗和对应二维码进行检测。为了训练检测模型,进行数据集的构建:采集来自同一地点具有不同光照情况的柑橘苗视频数据。对记录下的视频数据进行处理,共得到了2036张图片,按照4:1将其中1636幅图像划分为训练集,400幅图像划分为测试集。最后使用Labelme软件对采集到的图像进行人工标注。
模型训练时,采用Pytorch深度学习框架,操作平台为Windows 10,GPU为GeForce RTX3070(8GB显存),处理器为AMD Ryzen 7 5800H,运行内存为32GB。模型共经过了300个周期的训练,批处理大小设置为32,采用adam优化器,学习率为0.001。
巡检机器人使用D435i深度相机在巡检过程中采集柑橘苗的图像。采集到的图像将在抽帧后送入训练好的YOLO v8s模型进行柑橘苗与二维码的检测,检测完成后,利用深度信息滤除检测结果中的错误结果,最后利用位置关系进行柑橘苗与二维码的匹配并进行柑橘苗生长高度的计算。为了获取更准确的柑橘苗生长高度,提出了3种不同的计算方法,并对其效果展开了试验。
SLAM建图精度和定位算法性能直接影响到巡检机器人在巡检过程中的定位精度,定位精度又直接影响到巡检机器人可靠性和巡检安全性,因此需要对巡检机器人定位精度进行实验,以验证其可靠性和安全性。试验中获得的真实轨迹与定位轨迹的对比图以及误差变化图如下所示。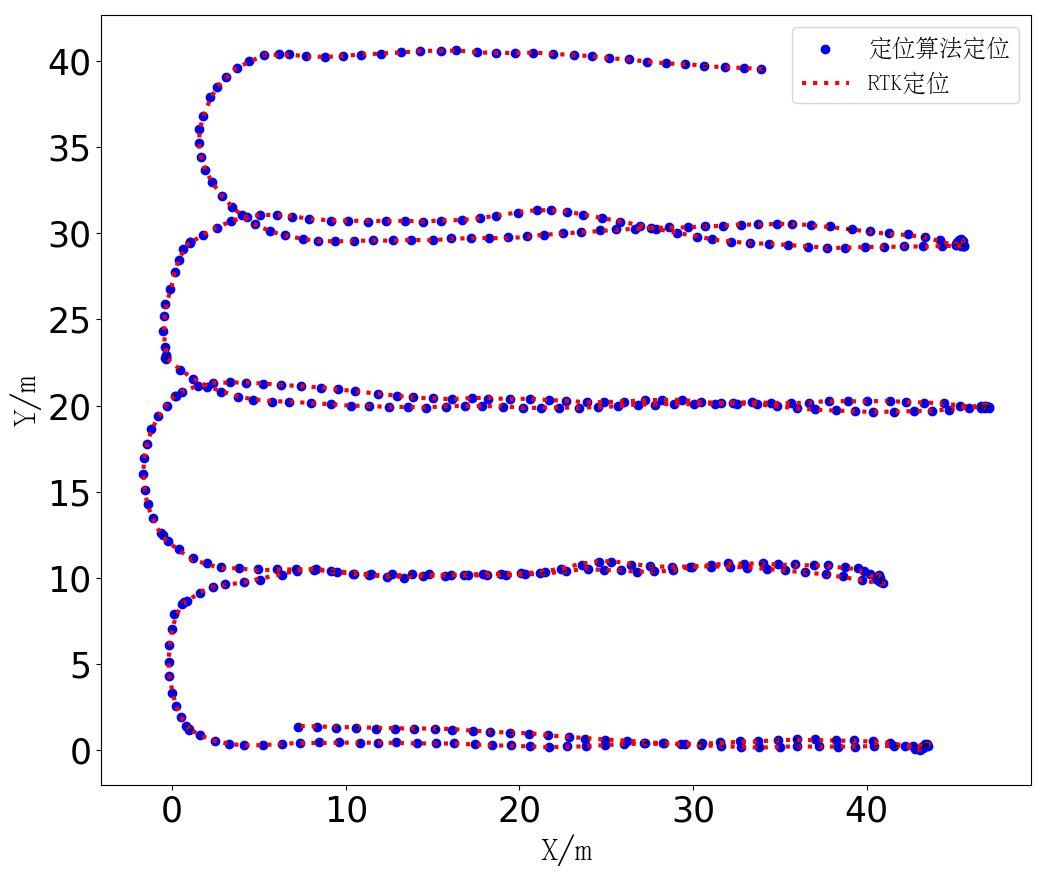
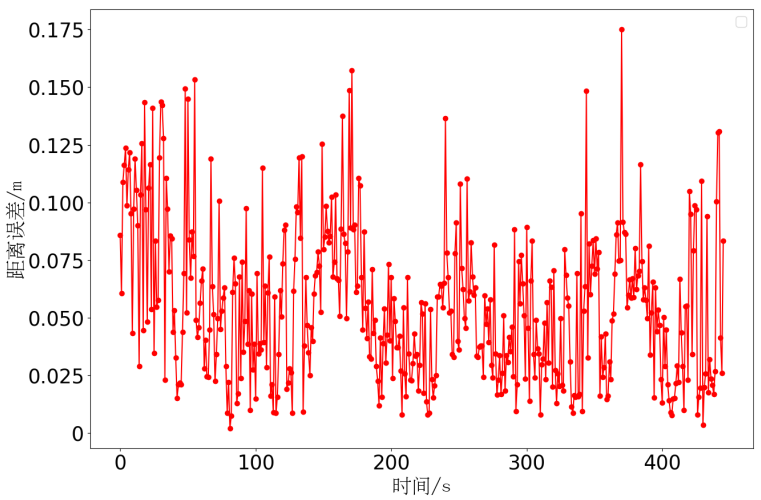
从轨迹图中可以看出,本次实验中通过两种定位方法得到的定位几乎一致,无明显差别。通过两种定位方法得到的定位最大相对误差为0.175m,平均相对误差距离为0.056m。因此,巡检机器人的定位精度满足巡检过程中的安全性和可靠性要求。
对3种计算方法得到的计算结果与通过人工测量获取的柑橘苗高度的真实值进行对比,测量的真实值精确到cm级。最终结果如下所示。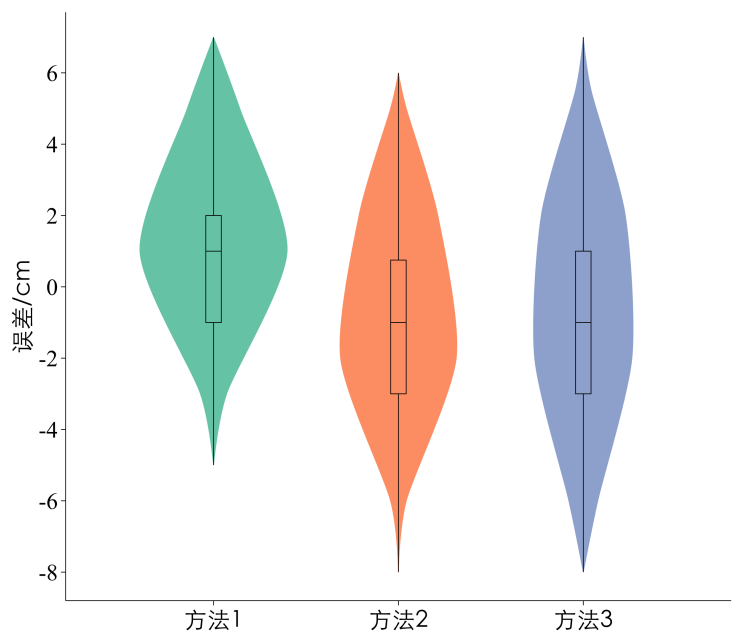
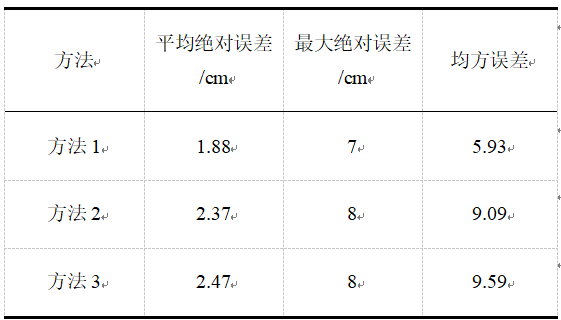
通过上表可以看出,方法1结果的平均绝对误差与最大绝对误差均为最小,通过上图中小提琴图形状与上表中均方误差的对比也可以得出,方法1的误差分布在真实值附近更加集中。以上结果说明结果的准确性和稳定性,方法1均明显优于其它方法,因此巡检机器人采用方法1计算柑橘苗的高度。
本研究借助当前的机器人技术,结合自动驾驶、图像检测与软件开发技术,设计出一款集自动驾驶、信息采集、数据存储与一键控制功能于一体的柑橘巡检机器人,提高了柑橘培育的自动化水平,能够有效助力柑橘产业的发展。
值得一提的是,该成果落地浙江省台州市一处柑橘种源中心内,受到了当地政府的关注,并被央视新闻所报道。
转载自:https://mp.weixin.qq.com/s/FSCEWQKZMIB0du9qT_Yzaw
